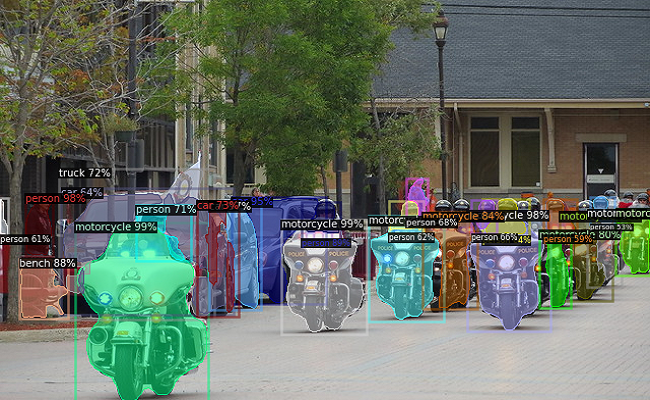
Basic architecture of Mask R-CNN network and the ideas behind it. ResNet backbone, RPN, RoIAlign, object detection brand, mask generation branch.
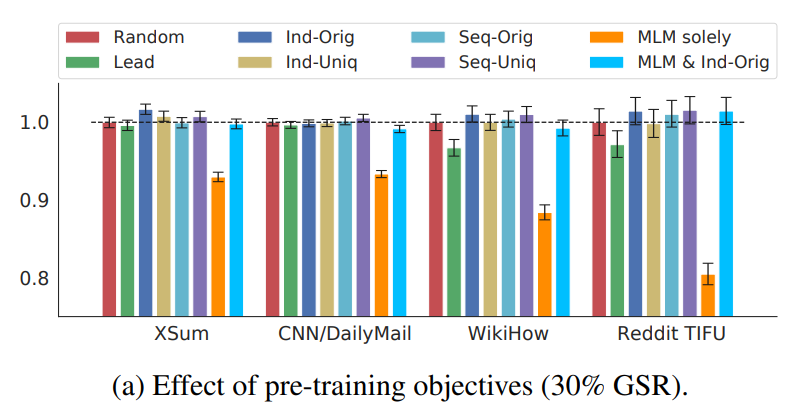
In this article, we discussed three selection strategies of Gap Sentence Generation for pre-training and their effects in downstream tasks. Ind-Orig, which is one of the principle selection strategies, has best performances compared with other 5 variants of GSG.
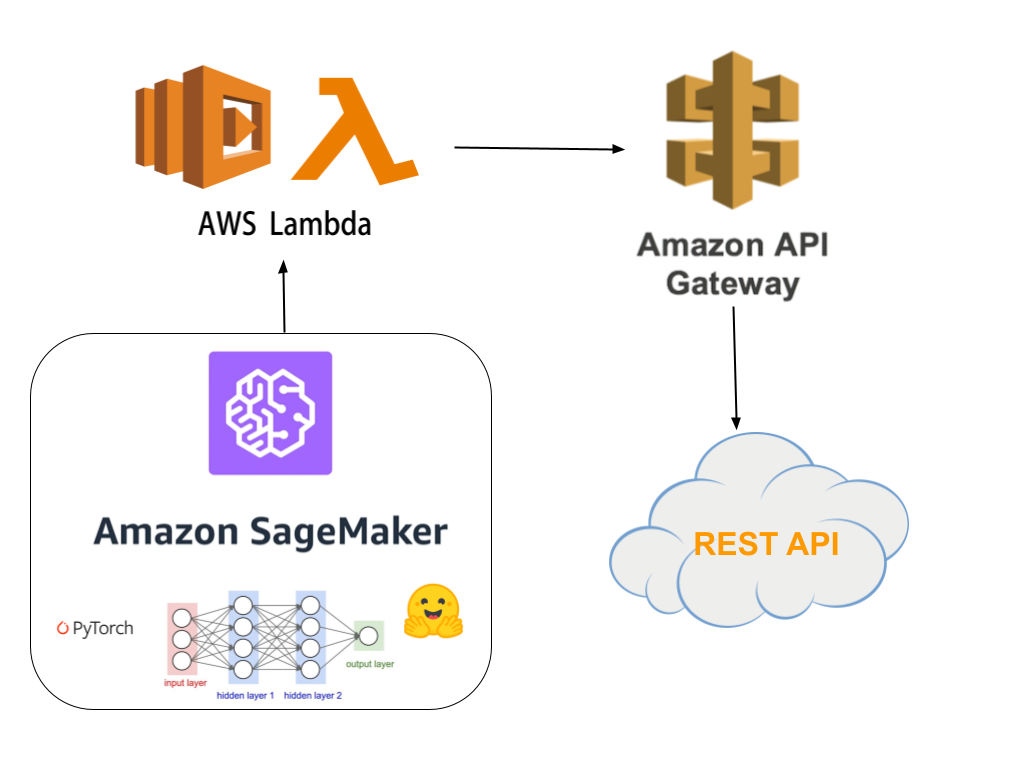
This article will go through how to deploy deep learning model to a REST API with Sagemaker, Lambda and API Gateway.
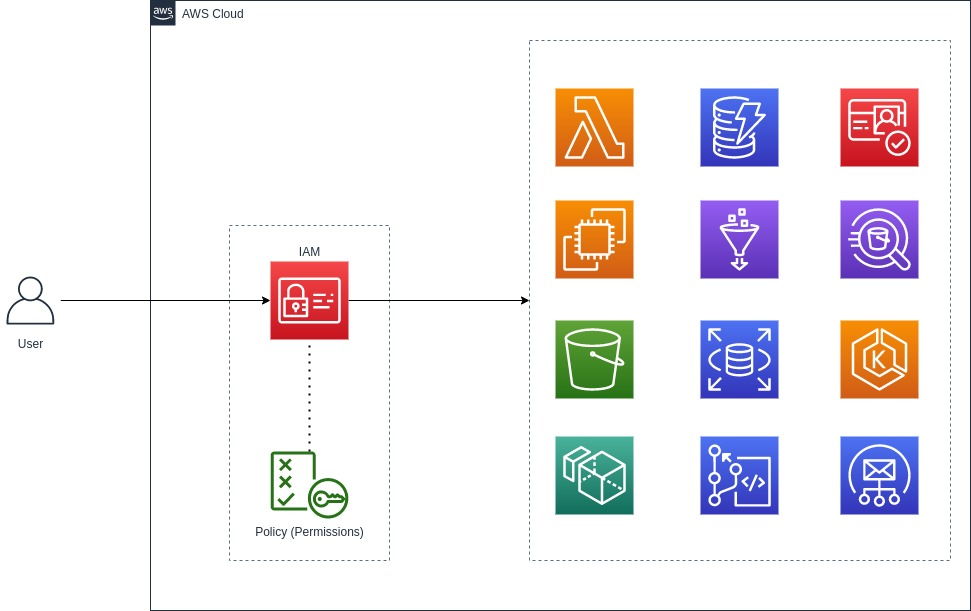
In this article, we go through 2 cases of creating IAM roles. The first one is used for SageMaker and can read, write to S3 bucket in SageMaker. The second one is used for Lambda use case.
In this article, we will discuss three methods of vehicle lateral control: Pure pursuit, Stanley, and MPC. I will also go through codes to achieve a self-driving car following a race track.
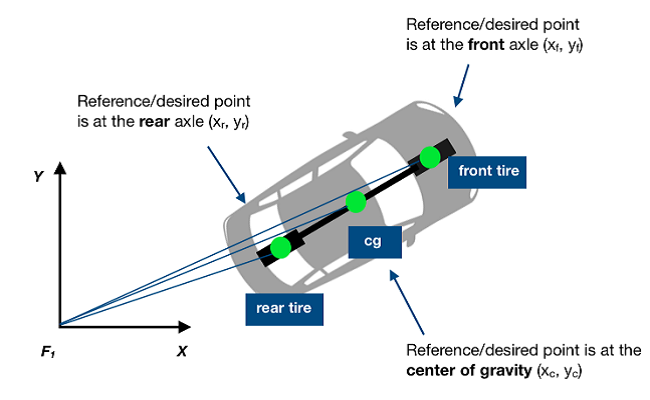
2D bicycle model can be expressed as a simplified car model. This is a classic model that does very well at capturing vehicle motion in normal driving conditions.
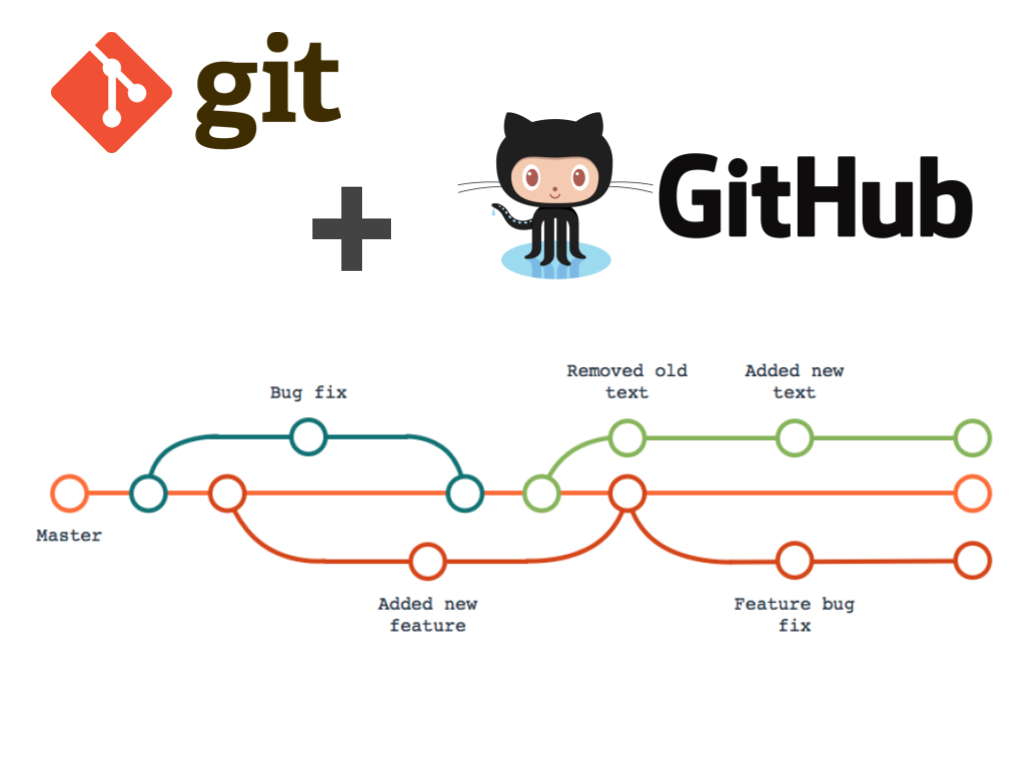
In this tutorial, we learned how to update our own work from the local machine to the remote repository. Meanwhile, we also learned how to track other people’s work and downloads or pull to our local working space. So we can work together as a team.
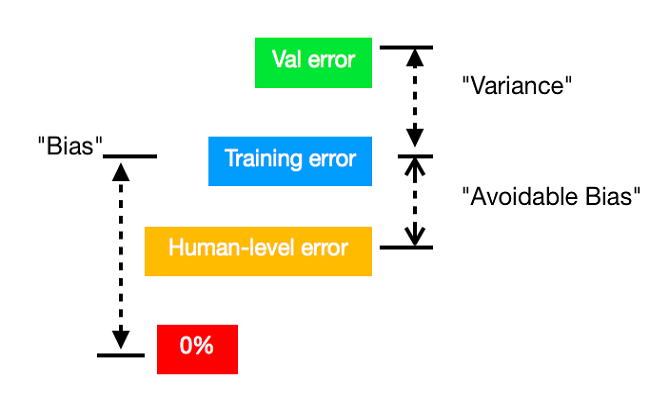
Learn about how to find main problems of the deep learning model such as overfit and underfit. So we can get the most promising ways to improve the deep learning model.
Learn about how to solve a simple binary classification problem with neural network model implemented in PyTorch.
Learn about NLP concepts: word embedding, language model, BLEU and ROUGE metric.